CNNs, Part 1: An Introduction to Convolutional Neural Networks
A simple guide to what CNNs are, how they work, and how to build one from scratch in Python.
| UPDATED
There’s been a lot of buzz about Convolution Neural Networks (CNNs) in the past few years, especially because of how they’ve revolutionized the field of Computer Vision. In this post, we’ll build on a basic background knowledge of neural networks and explore what CNNs are, understand how they work, and build a real one from scratch (using only numpy) in Python.
This post assumes only a basic knowledge of neural networks. My introduction to Neural Networks covers everything you’ll need to know, so you might want to read that first.
Ready? Let’s jump in.
1. Motivation
A classic use case of CNNs is to perform image classification, e.g. looking at an image of a pet and deciding whether it’s a cat or a dog. It’s a seemingly simple task - why not just use a normal Neural Network?
Good question.
Reason 1: Images are Big
Images used for Computer Vision problems nowadays are often 224x224 or larger. Imagine building a neural network to process 224x224 color images: including the 3 color channels (RGB) in the image, that comes out to 224 x 224 x 3 = 150,528 input features! A typical hidden layer in such a network might have 1024 nodes, so we’d have to train 150,528 x 1024 = 150+ million weights for the first layer alone. Our network would be huge and nearly impossible to train.
It’s not like we need that many weights, either. The nice thing about images is that we know pixels are most useful in the context of their neighbors. Objects in images are made up of small, localized features, like the circular iris of an eye or the square corner of a piece of paper. Doesn’t it seem wasteful for every node in the first hidden layer to look at every pixel?
Reason 2: Positions can change
If you trained a network to detect dogs, you’d want it to be able to a detect a dog regardless of where it appears in the image. Imagine training a network that works well on a certain dog image, but then feeding it a slightly shifted version of the same image. The dog would not activate the same neurons, so the network would react completely differently!
We’ll see soon how a CNN can help us mitigate these problems.
2. Dataset
In this post, we’ll tackle the “Hello, World!” of Computer Vision: the MNIST handwritten digit classification problem. It’s simple: given an image, classify it as a digit.

Each image in the MNIST dataset is 28x28 and contains a centered, grayscale digit.
Truth be told, a normal neural network would actually work just fine for this problem. You could treat each image as a 28 x 28 = 784-dimensional vector, feed that to a 784-dim input layer, stack a few hidden layers, and finish with an output layer of 10 nodes, 1 for each digit.
This would only work because the MNIST dataset contains small images that are centered, so we wouldn’t run into the aforementioned issues of size or shifting. Keep in mind throughout the course of this post, however, that most real-world image classification problems aren’t this easy.
Enough buildup. Let’s get into CNNs!
3. Convolutions
What are Convolutional Neural Networks?
They’re basically just neural networks that use Convolutional layers, a.k.a. Conv layers, which are based on the mathematical operation of convolution. Conv layers consist of a set of filters, which you can think of as just 2d matrices of numbers. Here’s an example 3x3 filter:

We can use an input image and a filter to produce an output image by convolving the filter with the input image. This consists of
- Overlaying the filter on top of the image at some location.
- Performing element-wise multiplication between the values in the filter and their corresponding values in the image.
- Summing up all the element-wise products. This sum is the output value for the destination pixel in the output image.
- Repeating for all locations.
Side Note: We (along with many CNN implementations) are technically actually using cross-correlation instead of convolution here, but they do almost the same thing. I won’t go into the difference in this post because it’s not that important, but feel free to look this up if you’re curious.
That 4-step description was a little abstract, so let’s do an example. Consider this tiny 4x4 grayscale image and this 3x3 filter:

The numbers in the image represent pixel intensities, where 0 is black and 255 is white. We’ll convolve the input image and the filter to produce a 2x2 output image:

To start, lets overlay our filter in the top left corner of the image:

Next, we perform element-wise multiplication between the overlapping image values and filter values. Here are the results, starting from the top left corner and going right, then down:
| Image Value | Filter Value | Result |
|---|---|---|
| 0 | -1 | 0 |
| 50 | 0 | 0 |
| 0 | 1 | 0 |
| 0 | -2 | 0 |
| 80 | 0 | 0 |
| 31 | 2 | 62 |
| 33 | -1 | -33 |
| 90 | 0 | 0 |
| 0 | 1 | 0 |
Next, we sum up all the results. That’s easy enough:
Finally, we place our result in the destination pixel of our output image. Since our filter is overlayed in the top left corner of the input image, our destination pixel is the top left pixel of the output image:

We do the same thing to generate the rest of the output image:
3.1 How is this useful?
Let’s zoom out for a second and see this at a higher level. What does convolving an image with a filter do? We can start by using the example 3x3 filter we’ve been using, which is commonly known as the vertical Sobel filter:

Here’s an example of what the vertical Sobel filter does:

Similarly, there’s also a horizontal Sobel filter:


See what’s happening? Sobel filters are edge-detectors. The vertical Sobel filter detects vertical edges, and the horizontal Sobel filter detects horizontal edges. The output images are now easily interpreted: a bright pixel (one that has a high value) in the output image indicates that there’s a strong edge around there in the original image.
Can you see why an edge-detected image might be more useful than the raw image? Think back to our MNIST handwritten digit classification problem for a second. A CNN trained on MNIST might look for the digit 1, for example, by using an edge-detection filter and checking for two prominent vertical edges near the center of the image. In general, convolution helps us look for specific localized image features (like edges) that we can use later in the network.
3.2 Padding
Remember convolving a 4x4 input image with a 3x3 filter earlier to produce a 2x2 output image? Often times, we’d prefer to have the output image be the same size as the input image. To do this, we add zeros around the image so we can overlay the filter in more places. A 3x3 filter requires 1 pixel of padding:

This is called “same” padding, since the input and output have the same dimensions. Not using any padding, which is what we’ve been doing and will continue to do for this post, is sometimes referred to as “valid” padding.
3.3 Conv Layers
Now that we know how image convolution works and why it’s useful, let’s see how it’s actually used in CNNs. As mentioned before, CNNs include conv layers that use a set of filters to turn input images into output images. A conv layer’s primary parameter is the number of filters it has.
For our MNIST CNN, we’ll use a small conv layer with 8 filters as the initial layer in our network. This means it’ll turn the 28x28 input image into a 26x26x8 output volume:

Reminder: The output is 26x26x8 and not 28x28x8 because we’re using valid padding, which decreases the input’s width and height by 2.
Each of the 8 filters in the conv layer produces a 26x26 output, so stacked together they make up a 26x26x8 volume. All of this happens because of 3 3 (filter size) 8 (number of filters) = only 72 weights!
3.4 Implementing Convolution
Time to put what we’ve learned into code! We’ll implement a conv layer’s feedforward portion, which takes care of convolving filters with an input image to produce an output volume. For simplicity, we’ll assume filters are always 3x3 (which is not true - 5x5 and 7x7 filters are also very common).
Let’s start implementing a conv layer class:
# Header: conv.py
import numpy as np
class Conv3x3:
# A Convolution layer using 3x3 filters.
def __init__(self, num_filters):
self.num_filters = num_filters
# filters is a 3d array with dimensions (num_filters, 3, 3)
# We divide by 9 to reduce the variance of our initial values
self.filters = np.random.randn(num_filters, 3, 3) / 9The Conv3x3 class takes only one argument: the number of filters. In the constructor, we store the number of filters and initialize a random filters array using NumPy’s randn() method.
Note: Diving by 9 during the initialization is more important than you may think. If the initial values are too large or too small, training the network will be ineffective. To learn more, read about Xavier Initialization.
Next, the actual convolution:
# Header: conv.py
class Conv3x3:
# ...
def iterate_regions(self, image):
'''
Generates all possible 3x3 image regions using valid padding.
- image is a 2d numpy array
'''
h, w = image.shape
for i in range(h - 2):
for j in range(w - 2):
im_region = image[i:(i + 3), j:(j + 3)]
yield im_region, i, j
def forward(self, input):
'''
Performs a forward pass of the conv layer using the given input.
Returns a 3d numpy array with dimensions (h, w, num_filters).
- input is a 2d numpy array
'''
h, w = input.shape
output = np.zeros((h - 2, w - 2, self.num_filters))
for im_region, i, j in self.iterate_regions(input):
output[i, j] = np.sum(im_region * self.filters, axis=(1, 2))
return outputiterate_regions() is a helper generator method that yields all valid 3x3 image regions for us. This will be useful for implementing the backwards portion of this class later on.
The line of code that actually performs the convolutions is highlighted above. Let’s break it down:
- We have
im_region, a 3x3 array containing the relevant image region. - We have
self.filters, a 3d array. - We do
im_region * self.filters, which uses numpy’s broadcasting feature to element-wise multiply the two arrays. The result is a 3d array with the same dimension asself.filters. - We np.sum() the result of the previous step using
axis=(1, 2), which produces a 1d array of lengthnum_filterswhere each element contains the convolution result for the corresponding filter. - We assign the result to
output[i, j], which contains convolution results for pixel(i, j)in the output.
The sequence above is performed for each pixel in the output until we obtain our final output volume! Let’s give our code a test run:
# Header: cnn.py
import mnist
from conv import Conv3x3
# The mnist package handles the MNIST dataset for us!
# Learn more at https://github.com/datapythonista/mnist
train_images = mnist.train_images()
train_labels = mnist.train_labels()
conv = Conv3x3(8)
output = conv.forward(train_images[0])
print(output.shape) # (26, 26, 8)Looks good so far.
Note: in our
Conv3x3implementation, we assume the input is a 2d numpy array for simplicity, because that’s how our MNIST images are stored. This works for us because we use it as the first layer in our network, but most CNNs have many more Conv layers. If we were building a bigger network that needed to useConv3x3multiple times, we’d have to make the input be a 3d numpy array.
4. Pooling
Neighboring pixels in images tend to have similar values, so conv layers will typically also produce similar values for neighboring pixels in outputs. As a result, much of the information contained in a conv layer’s output is redundant. For example, if we use an edge-detecting filter and find a strong edge at a certain location, chances are that we’ll also find relatively strong edges at locations 1 pixel shifted from the original one. However, these are all the same edge! We’re not finding anything new.
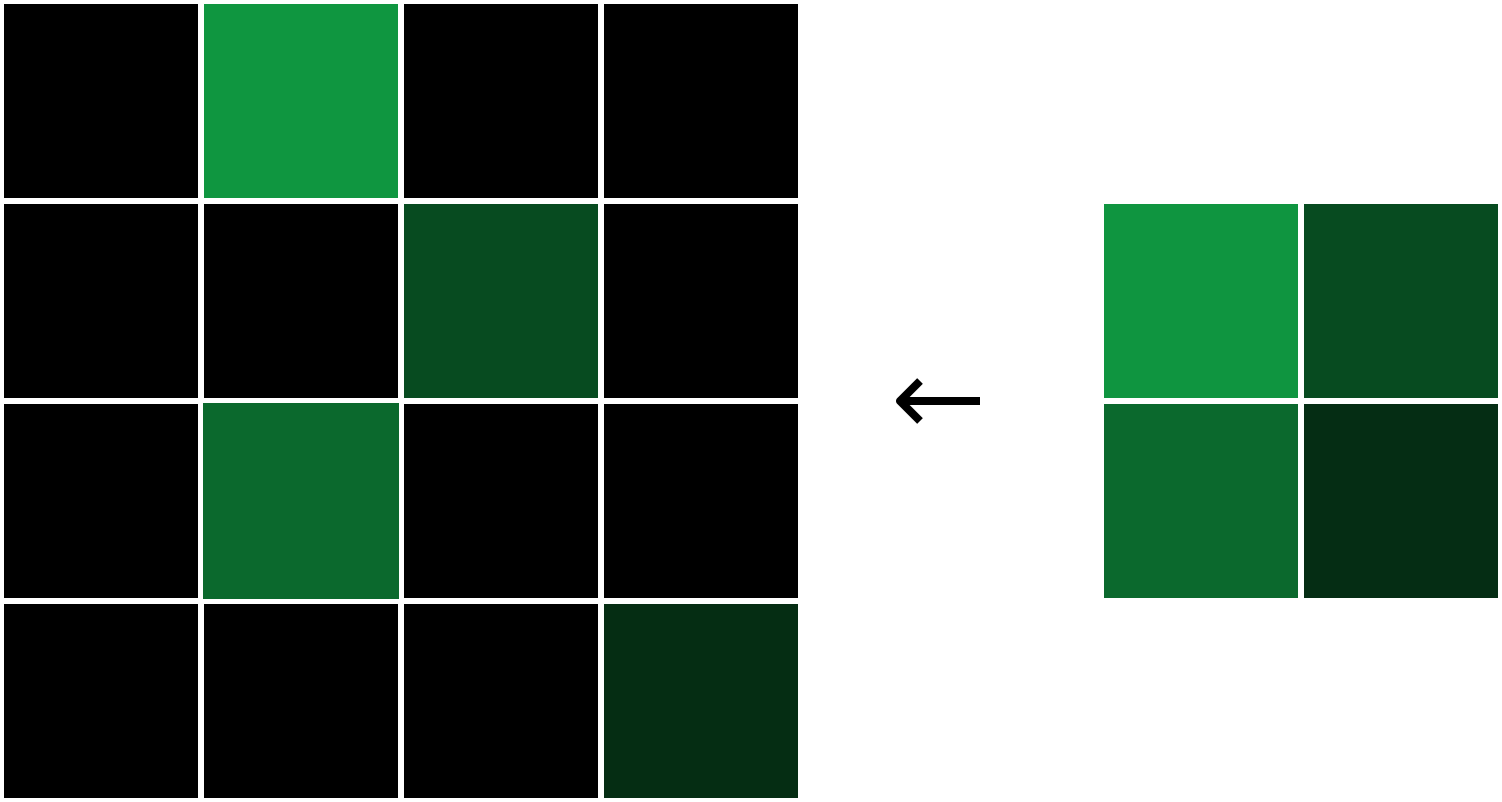
Pooling layers solve this problem. All they do is reduce the size of the input it’s given by (you guessed it) pooling values together in the input. The pooling is usually done by a simple operation like max, min, or average. Here’s an example of a Max Pooling layer with a pooling size of 2:
To perform max pooling, we traverse the input image in 2x2 blocks (because pool size = 2) and put the max value into the output image at the corresponding pixel. That’s it!
Pooling divides the input’s width and height by the pool size. For our MNIST CNN, we’ll place a Max Pooling layer with a pool size of 2 right after our initial conv layer. The pooling layer will transform a 26x26x8 input into a 13x13x8 output:

4.1 Implementing Pooling
We’ll implement a MaxPool2 class with the same methods as our conv class from the previous section:
# Header: maxpool.py
import numpy as np
class MaxPool2:
# A Max Pooling layer using a pool size of 2.
def iterate_regions(self, image):
'''
Generates non-overlapping 2x2 image regions to pool over.
- image is a 2d numpy array
'''
h, w, _ = image.shape
new_h = h // 2
new_w = w // 2
for i in range(new_h):
for j in range(new_w):
im_region = image[(i * 2):(i * 2 + 2), (j * 2):(j * 2 + 2)]
yield im_region, i, j
def forward(self, input):
'''
Performs a forward pass of the maxpool layer using the given input.
Returns a 3d numpy array with dimensions (h / 2, w / 2, num_filters).
- input is a 3d numpy array with dimensions (h, w, num_filters)
'''
h, w, num_filters = input.shape
output = np.zeros((h // 2, w // 2, num_filters))
for im_region, i, j in self.iterate_regions(input):
output[i, j] = np.amax(im_region, axis=(0, 1))
return outputThis class works similarly to the Conv3x3 class we implemented previously. The critical line is again highlighted: to find the max from a given image region, we use np.amax(), numpy’s array max method. We set axis=(0, 1) because we only want to maximize over the first two dimensions, height and width, and not the third, num_filters.
Let’s test it!
# Header: cnn.py
import mnist
from conv import Conv3x3
from maxpool import MaxPool2
# The mnist package handles the MNIST dataset for us!
# Learn more at https://github.com/datapythonista/mnist
train_images = mnist.train_images()
train_labels = mnist.train_labels()
conv = Conv3x3(8)
pool = MaxPool2()
output = conv.forward(train_images[0])
output = pool.forward(output)
print(output.shape) # (13, 13, 8)Our MNIST CNN is starting to come together!
5. Softmax
To complete our CNN, we need to give it the ability to actually make predictions. We’ll do that by using the standard final layer for a multiclass classification problem: the Softmax layer, a fully-connected (dense) layer that uses the Softmax function as its activation.
Reminder: fully-connected layers have every node connected to every output from the previous layer. We used fully-connected layers in my intro to Neural Networks if you need a refresher.
If you haven’t heard of Softmax before, read my quick introduction to Softmax before continuing.
5.1 Usage
We’ll use a softmax layer with 10 nodes, one representing each digit, as the final layer in our CNN. Each node in the layer will be connected to every input. After the softmax transformation is applied, the digit represented by the node with the highest probability will be the output of the CNN!

5.2 Cross-Entropy Loss
You might have just thought to yourself, why bother transforming the outputs into probabilities? Won’t the highest output value always have the highest probability? If you did, you’re absolutely right. We don’t actually need to use softmax to predict a digit - we could just pick the digit with the highest output from the network!
What softmax really does is help us quantify how sure we are of our prediction, which is useful when training and evaluating our CNN. More specifically, using softmax lets us use cross-entropy loss, which takes into account how sure we are of each prediction. Here’s how we calculate cross-entropy loss:
where is the correct class (in our case, the correct digit), is the predicted probability for class , and is the natural log. As always, a lower loss is better. For example, in the best case, we’d have
In a more realistic case, we might have
We’ll be seeing cross-entropy loss again later on in this post, so keep it in mind!
5.3 Implementing Softmax
You know the drill by now - let’s implement a Softmax layer class:
# Header: softmax.py
import numpy as np
class Softmax:
# A standard fully-connected layer with softmax activation.
def __init__(self, input_len, nodes):
# We divide by input_len to reduce the variance of our initial values
self.weights = np.random.randn(input_len, nodes) / input_len
self.biases = np.zeros(nodes)
def forward(self, input):
'''
Performs a forward pass of the softmax layer using the given input.
Returns a 1d numpy array containing the respective probability values.
- input can be any array with any dimensions.
'''
input = input.flatten()
input_len, nodes = self.weights.shape
totals = np.dot(input, self.weights) + self.biases
exp = np.exp(totals)
return exp / np.sum(exp, axis=0)There’s nothing too complicated here. A few highlights:
- We flatten() the input to make it easier to work with, since we no longer need its shape.
- np.dot() multiplies
inputandself.weightselement-wise and then sums the results. - np.exp() calculates the exponentials used for Softmax.
We’ve now completed the entire forward pass of our CNN! Putting it together:
# Header: cnn.py
import mnist
import numpy as np
from conv import Conv3x3
from maxpool import MaxPool2
from softmax import Softmax
# We only use the first 1k testing examples (out of 10k total)
# in the interest of time. Feel free to change this if you want.
test_images = mnist.test_images()[:1000]
test_labels = mnist.test_labels()[:1000]
conv = Conv3x3(8) # 28x28x1 -> 26x26x8
pool = MaxPool2() # 26x26x8 -> 13x13x8
softmax = Softmax(13 * 13 * 8, 10) # 13x13x8 -> 10
def forward(image, label):
'''
Completes a forward pass of the CNN and calculates the accuracy and
cross-entropy loss.
- image is a 2d numpy array
- label is a digit
'''
# We transform the image from [0, 255] to [-0.5, 0.5] to make it easier
# to work with. This is standard practice.
out = conv.forward((image / 255) - 0.5)
out = pool.forward(out)
out = softmax.forward(out)
# Calculate cross-entropy loss and accuracy. np.log() is the natural log.
loss = -np.log(out[label])
acc = 1 if np.argmax(out) == label else 0
return out, loss, acc
print('MNIST CNN initialized!')
loss = 0
num_correct = 0
for i, (im, label) in enumerate(zip(test_images, test_labels)):
# Do a forward pass.
_, l, acc = forward(im, label)
loss += l
num_correct += acc
# Print stats every 100 steps.
if i % 100 == 99:
print(
'[Step %d] Past 100 steps: Average Loss %.3f | Accuracy: %d%%' %
(i + 1, loss / 100, num_correct)
)
loss = 0
num_correct = 0Running cnn.py gives us output similar to this:
MNIST CNN initialized!
[Step 100] Past 100 steps: Average Loss 2.302 | Accuracy: 11%
[Step 200] Past 100 steps: Average Loss 2.302 | Accuracy: 8%
[Step 300] Past 100 steps: Average Loss 2.302 | Accuracy: 3%
[Step 400] Past 100 steps: Average Loss 2.302 | Accuracy: 12%This makes sense: with random weight initialization, you’d expect the CNN to be only as good as random guessing. Random guessing would yield 10% accuracy (since there are 10 classes) and a cross-entropy loss of , which is what we get!
Want to try or tinker with this code yourself? Run this CNN in your browser. It’s also available on Github.
6. Conclusion
That’s the end of this introduction to CNNs! In this post, we
- Motivated why CNNs might be more useful for certain problems, like image classification.
- Introduced the MNIST handwritten digit dataset.
- Learned about Conv layers, which convolve filters with images to produce more useful outputs.
- Talked about Pooling layers, which can help prune everything but the most useful features.
- Implemented a Softmax layer so we could use cross-entropy loss.
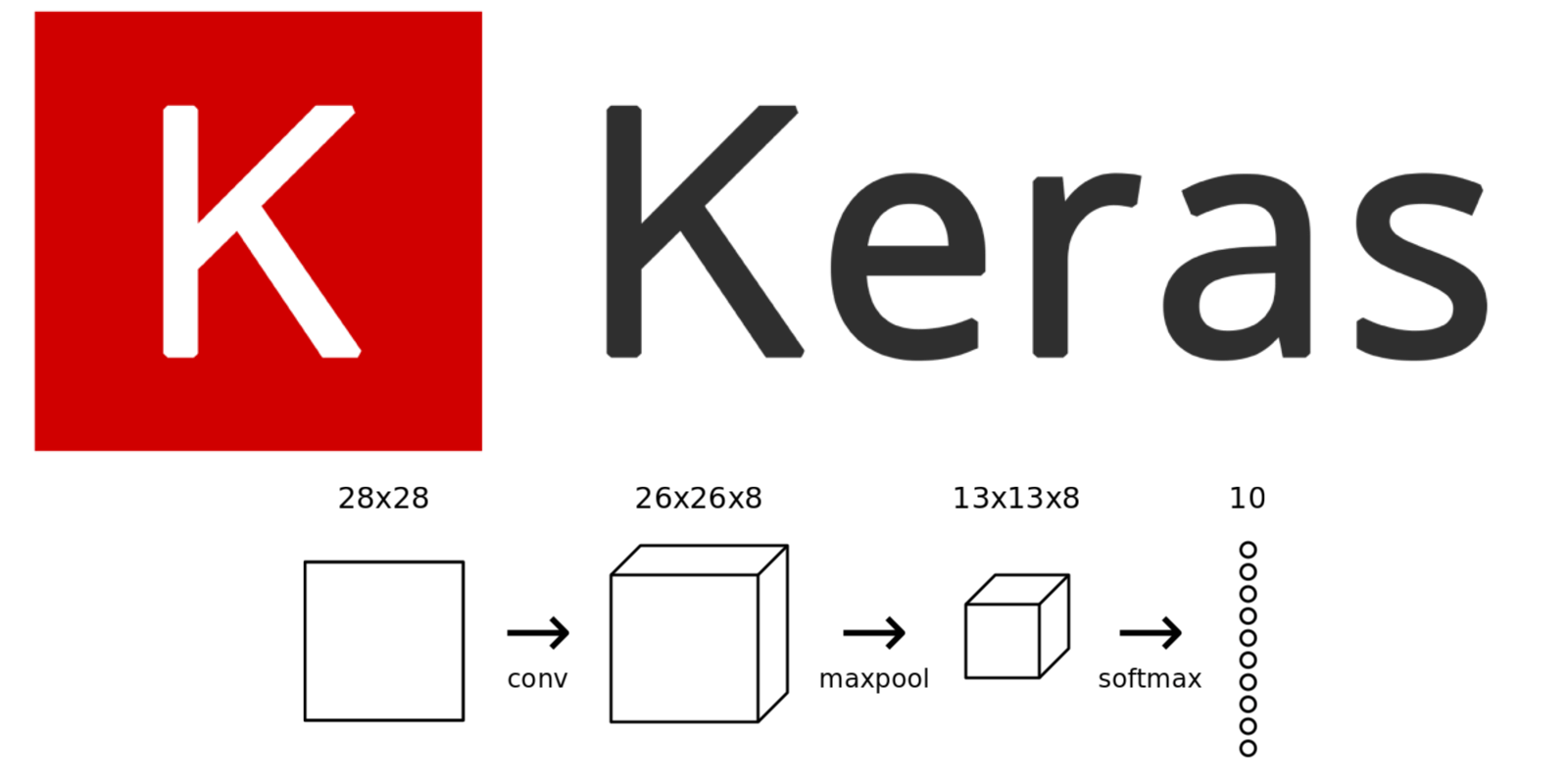
There’s still much more that we haven’t covered yet, such as how to actually train a CNN. Part 2 of this CNN series does a deep-dive on training a CNN, including deriving gradients and implementing backprop. Alternatively, you can also learn to implement your own CNN with Keras, a deep learning library for Python, or read the rest of my Neural Networks from Scratch series.
If you’re eager to see a trained CNN in action: this example Keras CNN trained on MNIST achieves 99% accuracy. CNNs are powerful!